





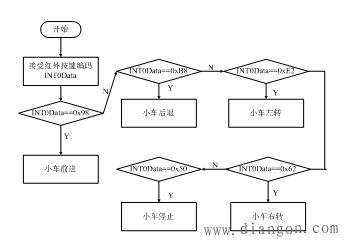
ЕЅЦЌЛњгІгУЯЕЭГПЊЗЂЪЕР§
1. жЧФмвЦЖЏЛњЦїШЫЯЕЭГЕФНсЙЙгыЙІФмжЧФмвЦЖЏЛњЦїШЫПижЦЯЕЭГЕФЩшМЦгыПЊЗЂжївЊВЩгУФЃПщЛЏзщКЯЩшМЦЃЌВЩгУATMELЙЋЫОЕФATMEGA16ЕЅЦЌЛњаОЦЌЃЌЭЌЪБХфКЯICCAVR7.01ШэМўПЊЗЂЛЗОГЃЌжЇГжCгябдЕФГЬађЩшМЦЁЃ
жЧФмвЦЖЏЛњЦїШЫгВМўжївЊгЩжБСїЕчЛњЧ§ЖЏФЃПщЁЂЗЂЩњЦїФЃПщЁЂДЎПкЭЈаХФЃПщвдМАЮоЯпвЃПиЁЂбЯпЁЂбАЙтЁЂБмеТЕШФЃПщзщГЩЁЃ
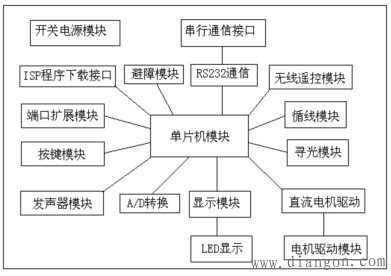
ЭМ1 жЧФмвЦЖЏЛњЦїШЫПижЦЯЕЭГгВМўПђЭМ
ЦфжївЊЙІФмЮЊЃК
Ђй КьЭтвЃПиЙІФм
КьЭтЭЈаХВЩгУ38KдиВЈДЋЪфЗНЪНЃЌРћгУГЄКчЕчЪгЛњвЃПиЦїзїЮЊКьЭтвЃПиЕФЗЂЩфзАжУЃЌРћгУДЎПквдМАДЎПкЕїЪджњЪжЃЌевГівЃПиЦїПижЦМќЃЈЧАНјЁЂКѓЭЫЁЂзѓзЊЁЂгвзЊвдМАЭЃжЙЃЉЕФБрТыЃЌЭЈЙ§БрГЬЪЕЯжПижЦЁЃ
Ђк БмеЯЙІФм
гЩКьЭтЗЂЫЭКЭНгЪезАжУСНДѓВПЗжзщГЩЃЌПЩвдЪЕЯжздЗЂздЪеЃЌвВПЩвдЪЕЯжЪЕбщАхжЎМфЕФЭЈаХЁЃЗЂЫЭВПЗжЗЂЫЭКьЭтдиВЈЃЌШєЧАУцУЛгаеЯАЮяЃЌНгЪмВПЗжВЛФмЪеЕНдиВЈЃЌШєЧАУцгаеЯАЮяЃЌдиВЈНЋЗЕЛиБЛНгЪмФЃПщНгЪмЃЌгкЪЧЭЈЙ§НгЪмФЃПщХаЖЯЪЧЗёЪеЕНдиВЈОЭПЩвдХаЖЯЧАУцЪЧЗёгаеЯАЮя
Ђл бЯпЙІФм
гЩ5ТЗЗДЩфЪНКьЭтЙтЕчДЋИаЦїзщГЩЃЌМьВтОрРыПЩЕїећЗЖЮЇДѓЃЌ4-10mmЗЖЮЇПЩгУЁЃ
Ђм бАЙтЙІФм
жївЊВЩгУСщУєЖШНЯИпЕФЙтУєЕчзшЃЌЭЈЙ§LM393НЋаХКХЗХДѓЃЌЗЕЛижїПиФЃПщЁЃ
2. КьЭтвЃПиЙІФм
Ђй КьЭтвЃПиЙЄзїдРэ

ЭМ2 ЮоЯпвЃПиЯЕЭГПђЭМ
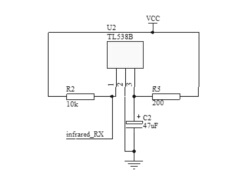
ЭЈГЃКьЭтвЃПиЯЕЭГгЩЗЂЩфКЭНгЪеСНДѓВПЗжзщГЩЁЃжївЊгІгУБр/НтТызЈгУМЏГЩЕчТЗаОЦЌРДНјааВйзїПижЦЁЃЗЂЩфВПЗжгЩМќХЬОиеѓЁЂБрТыЕїжЦЁЂLEDКьЭтЗЂЫЭЦїзщГЩЃЛНгЪмВПЗжгЩЙтЁЂЕчзЊЛЛЗХДѓЕчТЗЁЂНтЕївдМАНтТыЕчТЗзщГЩЃЈШчЭМ2ЫљЪОЃЉЁЃдкБОЪЕбщжаЃЌНгЪмзАжУВЩгУTL538BзЈгУМЏГЩаОЦЌЃЌЗЂЩфзАжУВЩгУГЄКчЕчЪгЛњвЃПиЦїЃЈRK23CЃЉЁЃ
Ђк вЃПиаХКХЗЂЩф
ЕБЗЂЩфЦїАДЯТАДМќКѓЃЌМДгавЃПиТыЗЂГіЃЌЫљАДЕФМќВЛЭЌвЃПиБрТывВОЭВЛЭЌЃЌетжжвЃПиТыжївЊОпгавдЯТЬиеїЃК
ВЩгУТіПэЕїжЦЕФДЎааТыЃЌвдТіПэЮЊ0.565msЁЂМфИєЮЊ0.56 msЁЂжмЦкЮЊ1.125 msЕФзщКЯБэЪОЖўНјжЦЕФЁА0ЁБЃЛвдТіПэЮЊ0.565msЁЂМфИєЮЊ1. 685 msЁЂжмЦкЮЊ2. 25 msЕФзщКЯБэЪОЖўНјжЦЕФЁА1ЁБЃЌЦфВЈаЮШчЭМ3ЫљЪОЁЃ
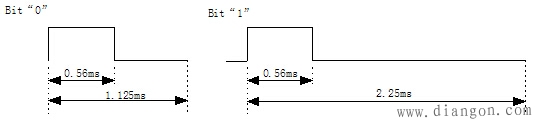
ЭМ3 вЃПиТыЕФЁА0ЁБКЭЁА1ЁБ
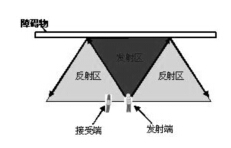
ЩЯЪіЕФЁА0ЁБКЭЁА1ЁБзщГЩЕФ32ЮЛЖўНјжЦТыО38kHZЕФдиЦЕНјааЖўДЮЕїжЦвдЬсИпЗЂЩфаЇТЪЃЌДяЕННЕЕЭЕчдДЙІКФЕФФПЕФЃЌШЛКѓдйЭЈЙ§КьЭтЗЂЩфЖўМЋЙмВњЩњКьЭтЯпЯђЭтНчПеМфЗЂЩфЃЌШчЭМ4ЫљЪОЁЃвЃПиБрТыВњЩњЕФЪЧ32ЮЛЖўНјжЦБрТыЃЌЦфжаЧА16ЮЛЪЧгУЛЇЪЖБ№ТыЃЌФмЧјБ№ВЛЭЌЕФЕчЦїЩшБИЃЌЗРжЙВЛЭЌЛњжжвЃПиТыЛЅЯрИЩШХЃЌКѓ16ЮЛЮЊ8ЮЛВйзїТыЃЈЙІФмТыЃЉМАЦфЗДТыЁЃ
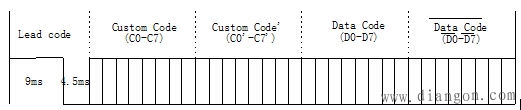
ЭМ4 КьЭтЗЂЩфБрТыЭМ
вЃПиЦїдкАДМќАДЯТКѓЃЌжмЦкадЕиЗЂГіЭЌвЛжж32ЮЛЖўНјжЦТыЃЌжмЦкДѓдМЮЊ108msЃЌвЛзщТыБОЩэЕФГжајЪБМфЫцЫќАќКЌЕФЖўНјжЦЁА0ЁБЁА1ЁБЕФИіЪ§ВЛЭЌЖјВЛЭЌЃЌДѓдМдк45~63msжЎМф,ЭМ5ЮЊЗЂЩфВЈаЮЭМЁЃ
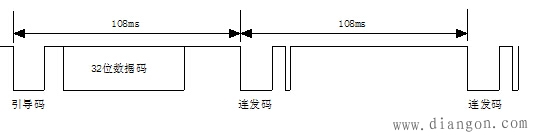
ЭМ5 вЃПиСЌЗЂаХКХВЈаЮ
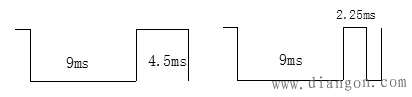
ЕБвЛИіАДМќБЛАДЯТГЌЙ§36msЃЌеёЕДЦїЪЙаОЦЌМЄЛюЃЌНЋЗЂЩфвЛзщ108msЕФБрТыТіГхЃЌет108msЗЂЩфДњТыгЩвЛИів§ЕМТыЃЈ9msЃЉЁЂНсЙћТыЃЈ4.5msЃЉЁЂЕЭ8ЮЛЕижЗТыЃЈ9ms~18msЃЉЁЂИп8ЮЛЕижЗТыЃЈ9ms~18msЃЉЁЂ8ЮЛЪ§ОнТыЃЈ9ms~18msЃЉКЭет8ЮЛЪ§ОнЕФЗДТыЃЈ9ms~18msЃЉзщГЩЃЌШчЙћАДЯТГЌЙ§108msШдЮДЫЩПЊЃЌНгЯТРДЗЂЩфЕФДњТыЃЈСЌајТыЃЉНЋНігЩЦ№ЪМТыЃЈ9msЃЉКЭНсЪјТыЃЈ2.25msЃЉзщГЩЁЃ
ЭМ6 в§ЕМТы ЭМ7 СЌЗЂТы
Ђл вЃПиаХКХНгЪм
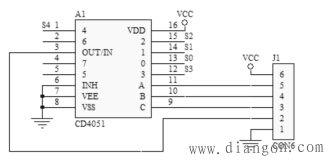
НгЪмЕчТЗЪЙгУвЛжжКьЭтНгЪмКЭЗХДѓгквЛЬхЕФКьЭтНгЪмЦїTL538BЃЌВЛашвЊШЮКЮЭтНгдЊМўЃЌОЭФмЭъГЩДгКьЭтЯпНгЪмЕНЪфГігыTLLЕчЦНаХКХМцШнЕФЫљгаЙЄзїЃЌЖјЬхЛ§КЭЦеЭЈЕФЫмСЯЗтзАШ§МЋЙмДѓаЁвЛбљЃЌЪЪКЯгкИїжжКьЭтвЃПиКаКьЭтЪ§ОнДЋЪфЁЃ
Ђм КьЭтвЃПиЕчТЗЭМ
ЭМ8 TL538BгыЕЅЦЌЛњСЌНгЭМ
Ђн КьЭтвЃПиГЬађСїГЬЭМ
ЭМ9 КьЭтвЃПиГЬађВЮПМСїГЬЭМ
3.КьЭтБмеЯЙІФм
Ђй КьЭтБмеЯдРэ
КьЭтБмеЯДЋИаЦїОпгавЛЖдКьЭтаХКХЗЂЩфгыНгЪеаХКХзАжУЃЌЗЂЩфЙмЗЂЩфвЛЖЈЦЕТЪЕФКьЭтаХКХЃЌНгЪеЙмНгЪеетжжЦЕТЪЕФКьЭтаХКХЃЌЕБКьЭтЕФМьВтЗНЯђгіЕНеЯАЮяЃЈЗДЩфУцЃЉЪБЃЌКьЭтаХКХЗДЩфЛиРДБЛНгЪеЙмНгЪеЃЌОЙ§ДІРэжЎКѓЃЌЭЈЙ§Ъ§зжДЋИаЦїНгПкЗЕЛиЕНЛњЦїШЫжїЛњЃЌЛњЦїШЫМДПЩРћгУКьЭтВЈЕФЗЕЛиаХКХРДЪЖБ№жмЮЇЛЗОГЕФБфЛЏЁЃ
ЭМ10 ЗЂЩфНгЪмдРэЭМ
КьЭтБмеЯаХКХЗЂЩфзАжУЃЈШчЭМ10ЫљЪОЃЉжївЊгЩ555ЖЈЪБЦїКЭЭтНчдЊМўR1ЁЂR2ЁЂC3ЁЂC2зщГЩЕФЖраГеёЕДЦїЙЙГЩЁЃЕчТЗУЛгаЮШЬЌЃЌНіДцдкСНИіднЮШЬЌЃЌЕчТЗвВВЛашвЊЭтНгДЅЗЂаХКХЃЌРћгУЕчдДЭЈЙ§R1ЁЂR2ЯђC3ГфЕчЃЌвдМАC3ЭЈЙ§R1ЯђЗХЕчЖЫDISCHGЗХЕчЃЌЪЙЕчТЗВњЩњеёЕДЁЃwww.diangon.comЕчШнC3дк2/3VccКЭ1/3VccжЎМфГфЕчКЭЗХЕчЃЌДгЖјдкЪфГіЖЫЕУЕНвЛЯЕСаЕФОиаЮВЈЃЌЖдгІЕФВЈаЮШчЯТЭМ12ЫљЪОЁЃ
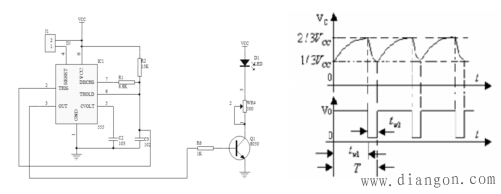
ЭМ11 КьЭтЗЂЩфЕчТЗЭМ ЭМ12 ЖраГеёЕДЦїЕФВЈаЮЭМ
ЪфГіаХКХЕФЪБМфВЮЪ§ЪЧЃКT=tw1+tw2
tw1=0.7 (R1+R2) C
tw2=0.7R2 C
ЦфжаЃЌtw1ЮЊVcгЩ1/3VccЩЯЩ§ЕН2/3VccЫљашЕФЪБМфЃЌtw2ЮЊЕчШнC3ЗХЕчЫљашЕФЪБМфЁЃ
зЂЃКЭЈЙ§ЕїНкWR4ПЩЕїЕчзшЕФзшжЕЃЌПЩвддіДѓЛђМѕЖЬеЯАЮяОрРыЕФМьВтЁЃ
Ђк КьЭтБмеЯГЬађСїГЬЭМ
ЭМ13 КьЭтБмеЯГЬађВЮПМСїГЬЭМ
4. бЯпЙІФм
Ђй бЯпдРэ

(a) (b) (c) (d)
ЭМ14 аЁГЕбЯпЪОвтЭМ
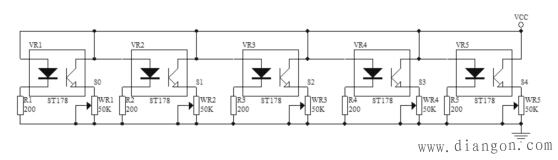
вЛАуЧщПіЯТЃЌбЁдёШ§ИіST178ЙтЕчДЋИаЦїЃЌБрКХЗжБ№ЮЊAЁЂBЁЂCЃЌШчЭМ14ЫљЪОЃЌBМьВтЕНКкЯпЃЌЖјAЁЂCУЛгаМьВтЕНЃЌФЧУДЛњЦїШЫаЁГЕжБааЃЛШєA ДІгкКкЯпЩЯЃЌBЁЂC дкАзЩЋЧјгђЃЌФЧУДЛњЦїШЫаЁГЕзѓЦЋвдНУе§ТЗЯпЃЛШєC ДІгкКкЯпЩЯЃЌAЁЂB дкАзЩЋЧјгђЃЌдђЛњЦїШЫаЁГЕгвЦЋвдНУе§ТЗЯпЃЌA ЁЂB ЁЂC ЖМдкКкЯпЩЯЪБЃЌЛњЦїШЫаЁГЕДІгкКкЯпНЛНчДІЁЃ
Ђк бЯпЕчТЗЭМ
ЭМ15 ST178бЯпЕчТЗЭМ
ЭМ16 ЖрТЗЭЈЕРбЁдёЕчТЗЭМ

БрМЃКadmin зюКѓаоИФЪБМфЃК2018-05-08





