





基于MM32SPIN电机/电源专用芯片的有刷电机驱动应用方案——机器人舵机
本文简单介绍基于MM32SPIN电机/电源专用芯片有刷驱动技术于"舵机轨迹控制"的应用实例。方案特色:
ARM Cortex-M0高性能电机驱动专用芯片
内建两组N型Gate Driver
速度命令输入可为模拟电压或PWM信号
ADC 采样位置回授

图一:常见的7.5V/10W 有刷舵机
2、有刷舵机技术原理
在此介绍有刷舵机轨迹移动实现方法.
有刷舵机内部分为三大区块
控制板
有刷马达
位置回授传感器

图二:有刷马达与控制板

图三:回授位置传感器
定义:
LSB : 12 bits ADC 采样单位
a :加速度单位: (LSB÷(ms^2))
t :时间单位:(ms)
SP : 速度单位:(LSB÷ms)
P1:结束位置单位:LSB
P0 :起始位置单位:LSB
T1 :结束时间单位:ms(毫秒)
T0 :起始时间单位:ms(毫秒)
V1 :(P1-P0) ÷(T1-T0) 单位::(LSB÷ms)
V0 : 初始速度单位: (LSB÷ms)
X :距离单位::(LSB)
Th :(T1-T0)÷2单位:(ms)
V2 : 速度轨迹最高速单位:(LSB÷ms)
有刷速度与轨迹关系
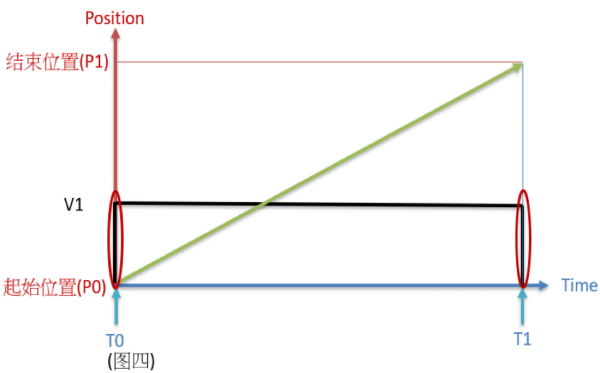
图四 :理想矩形轨迹运动(红色圈标示a = ∞)
V1为等速度
此时忽略红色加速度运动时间理想上为零
绿色为位置轨迹
根据等加速度运动公式:
V = V0 +(a*t ) ;(公式一)
x = V0t +((a*t*t)÷2);(公式二)
当初速为零则V0 可忽略
我们可以从加速度运动(公式一) (公式二) 得知电机从初速到等速,需要花费时间与距离
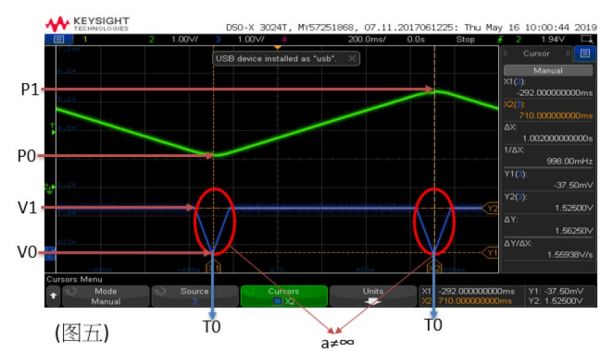
图五:非理想轨迹运动
需考虑物体本身从静止→移动→静止过程需要所谓加速度运动
CH2 绿色:位置轨迹(0~5) Voltage对应了(0~4095) LSB
CH3 蓝色:速度轨迹(0~5) Voltage对应了(0~4095) V
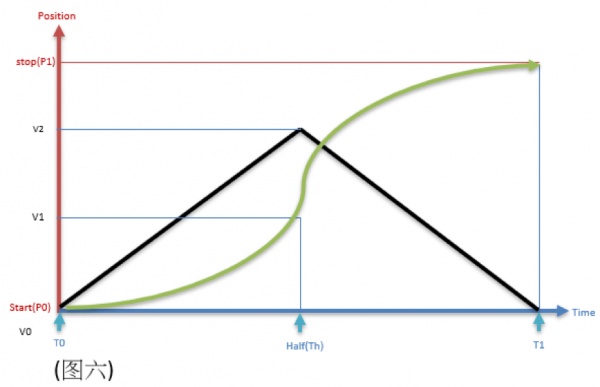
三角形速度轨迹运动
如图6
V2 = (P1-P0)÷(Th-T0);
V2 = 2*V1; 假设:电机速度可达到(2*V1)
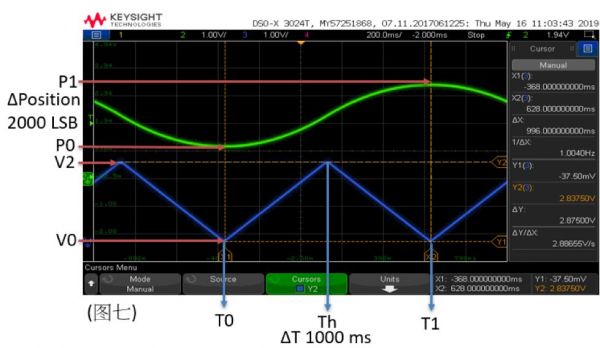
图七: 实际轨迹运动时间
CH2 绿色:位置轨迹(0~5) Voltage对应了(0~4095) LSBCH3 蓝色:速度轨迹(0~5) Voltage对应了(0~4095) V
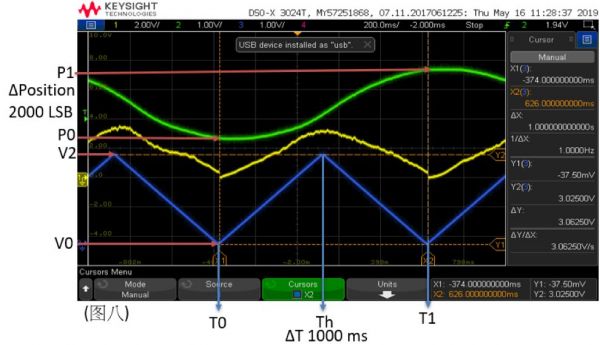
图八:电机实际运转
CH1 黄色:PWM占空比(0~5)Voltage,对应了( 0~100)% duty cycle
CH2 绿色:位置轨迹(0~5) Voltage对应了(0~4095) LSB
CH3 蓝色:速度轨迹(0~5) Voltage对应了(0~4095) V
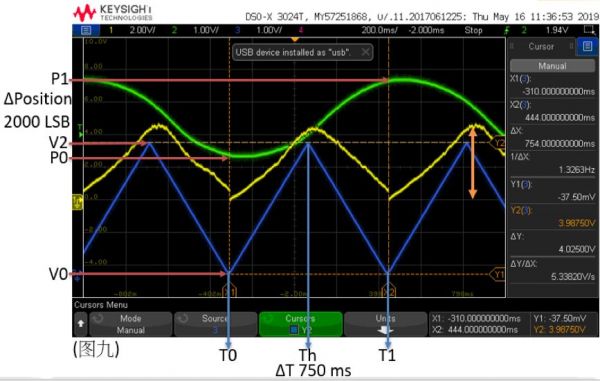
图九:电机实际运转
CH1 黄色:PWM占空比(0~5)Voltage,对应了( 0~100)% duty cycle
CH2 绿色:位置轨迹(0~5) Voltage对应了(0~4095) LSB
CH3 蓝色:速度轨迹(0~5) Voltage对应了(0~4095) V
从图八与图九显示当距离越短或是时间越短情况下速度轨迹随之增高
V(速度) ∝PWM 占空比,当速度过高则占空比会呈现Full duty 状态(如图九橘色箭头所标示占空比已接近满载)
梯形速度轨迹运动
梯形的速度轨迹主要是改善
防止速度过高损坏电机
电机本身能驱动最高速
梯形速度轨迹介于矩形与三角形轨迹运动
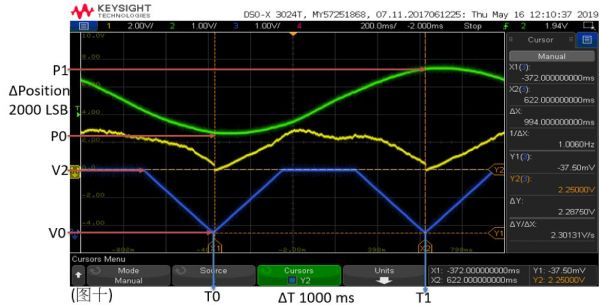
图十:电机实际运转
CH1 黄色:PWM占空比(0~5)Voltage,对应了( 0~100)% duty cycle
CH2 绿色:位置轨迹(0~5) Voltage对应了(0~4095) LSB
CH3 蓝色:速度轨迹(0~5) Voltage对应了(0~4095) V
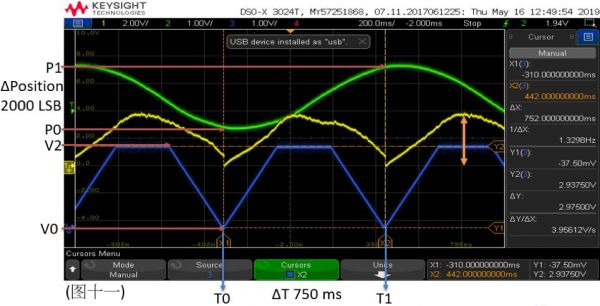
图十一:电机实际运转
CH1 黄色:PWM占空比(0~5)Voltage,对应了( 0~100)% duty cycle
CH2 绿色:位置轨迹(0~5) Voltage对应了(0~4095) LSB
CH3 蓝色:速度轨迹(0~5) Voltage对应了(0~4095) V
从图九与图十一可以明显看到梯形速度轨迹比三角形速度轨迹占空比是下降,但斜率上升
三角形速度轨迹
梯形速度轨迹
加速度(a)
小
大
最高速 (V2)
大
小
三角形速度轨迹与梯形速度轨迹该如何选择,取决于电机本身特性,及应用调整轨迹设定
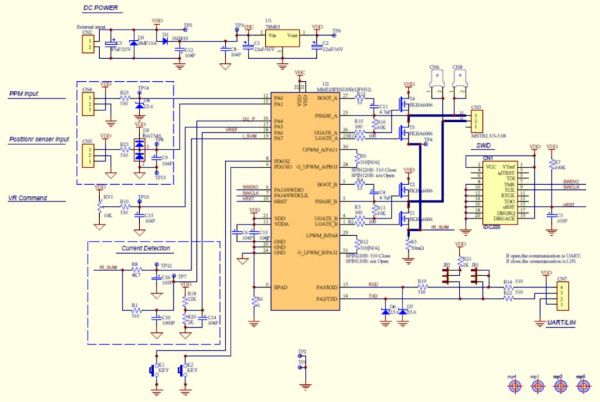
3、硬件设计
4、结论
MM32SPIN电机/电源专用芯片,具有内建两相Gate Driver,相当适合有刷电机应用,更大大地简化了电机驱动板的设计,内建除法器更可快速反应轨迹控制算法,提高了软件效率,同时带来开发成本降低的好处,如需要了解更多灵动微MCU产品,请联系灵动微核心代理商-颖特新科技

编辑:ls 最后修改时间:2022-06-13





